Weitere Unterabschnitte: Einsatz | KUKA-Roboter | Simulation
KUKA-Roboter
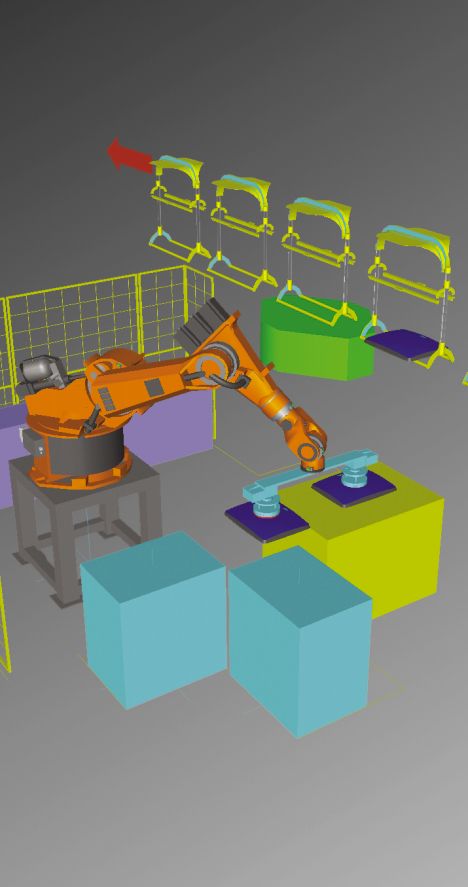
Schweisszangen-Systeme
-
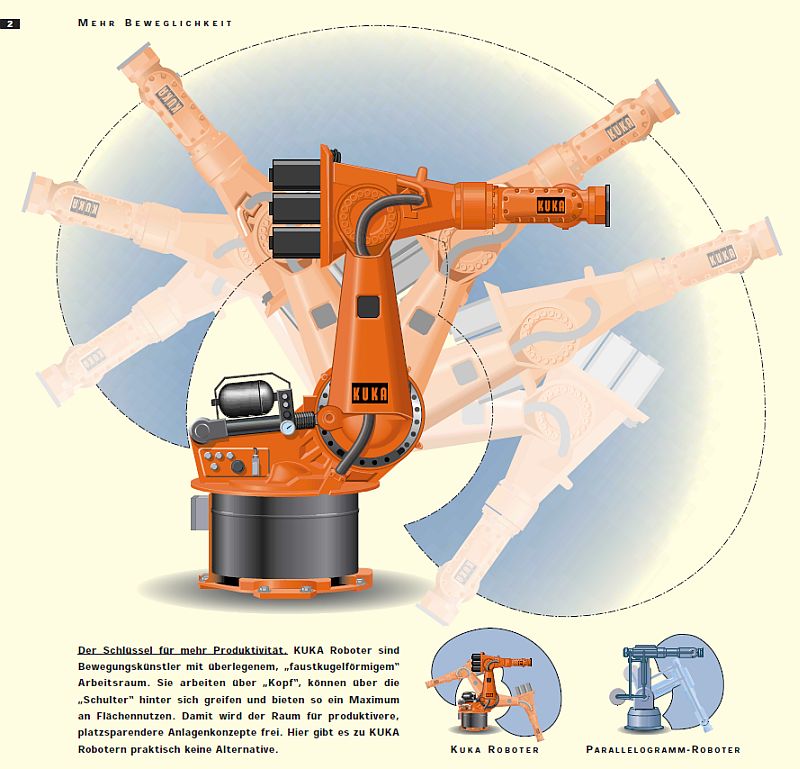
- KUKA Roboter: mehr Beweglichkeit
-

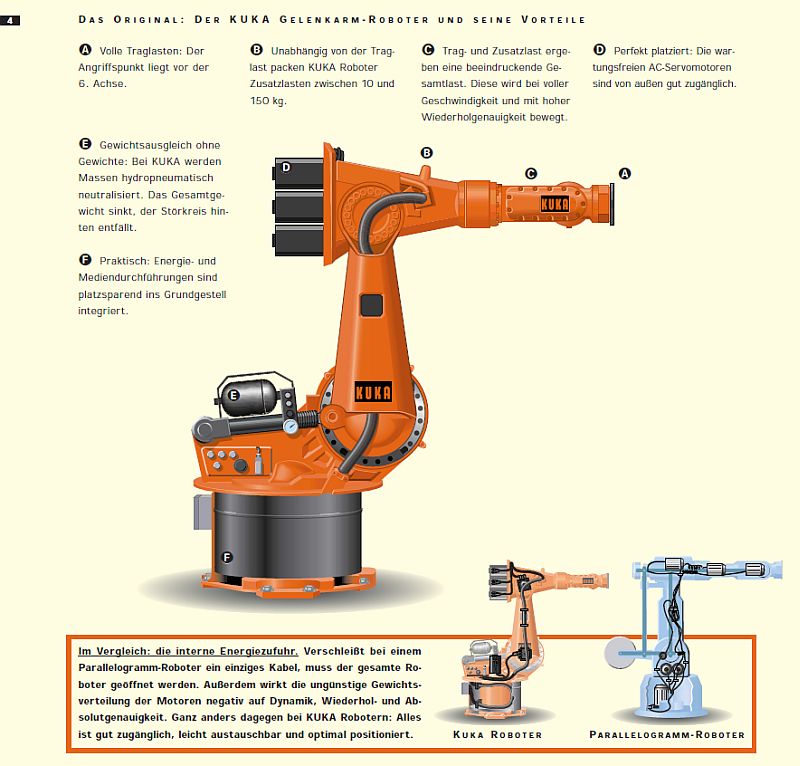
- Der KUKA Gelenkarm-Roboter und seine Vorteile
-
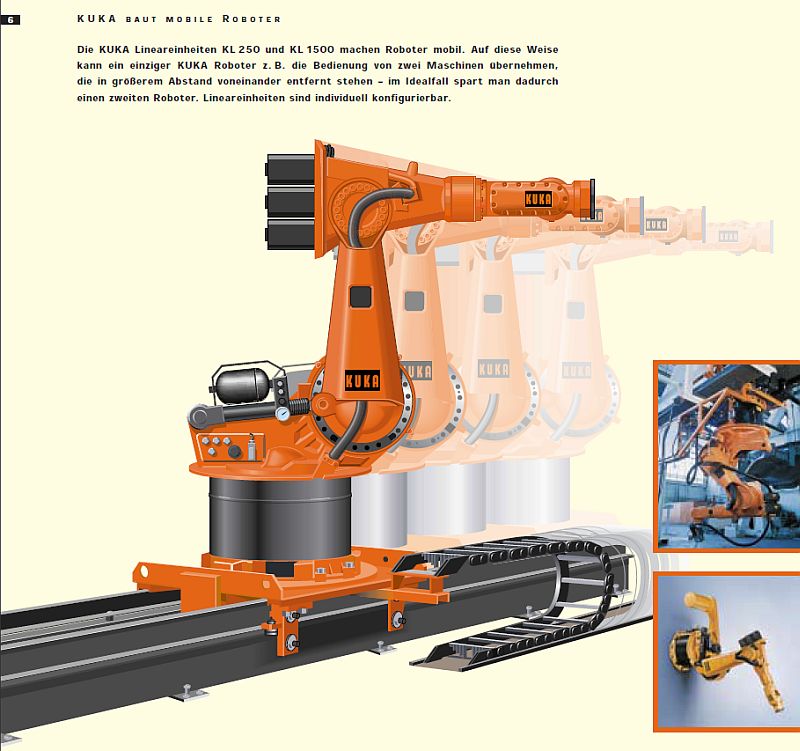
- Die KUKA Lineareinheiten
-

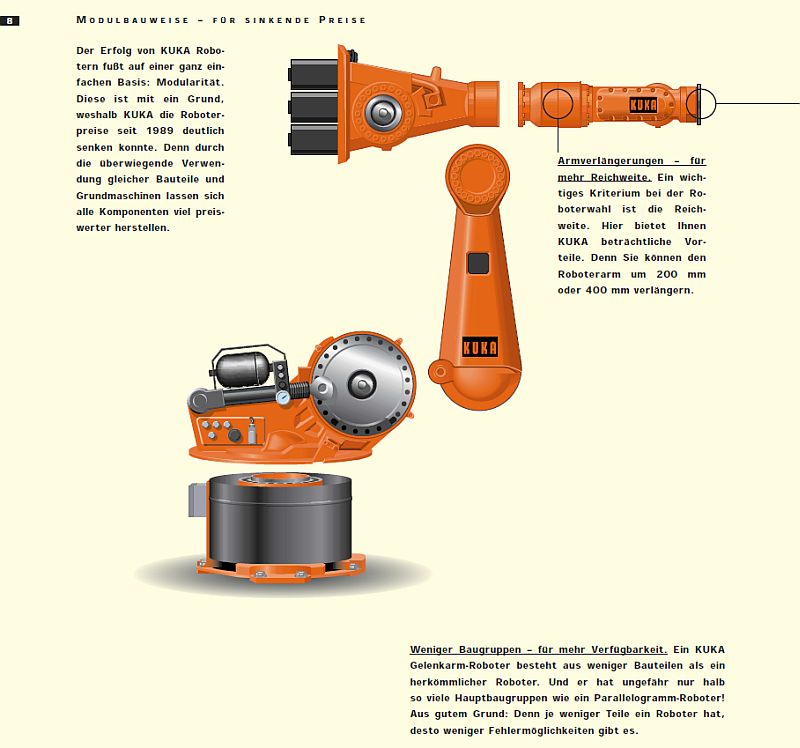
- KUKA Roboter in Modulbauweise
-
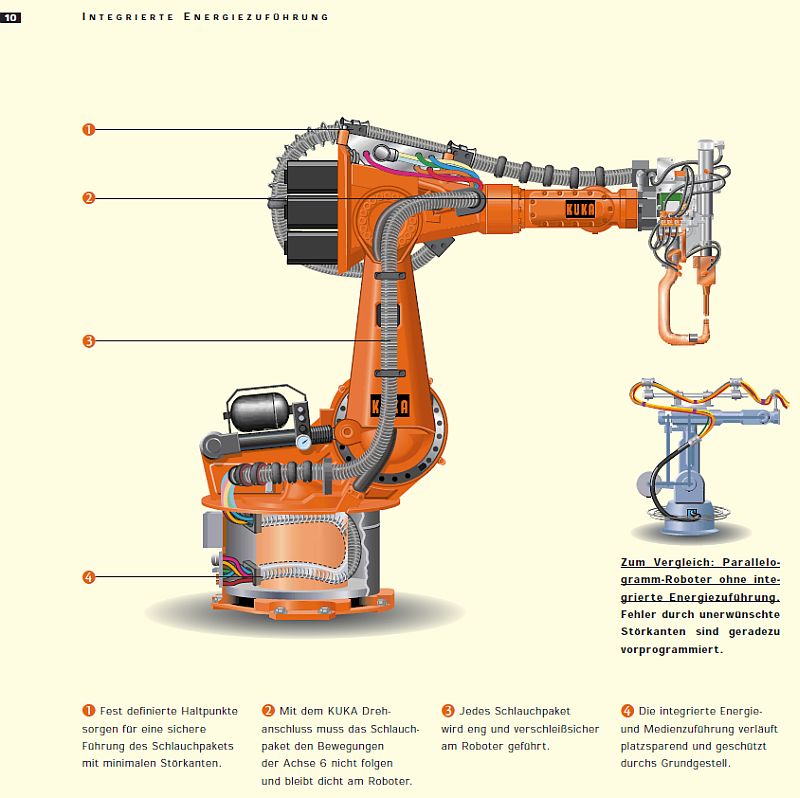
- KUKA Roboter mit integrierter Energiezuführung
-

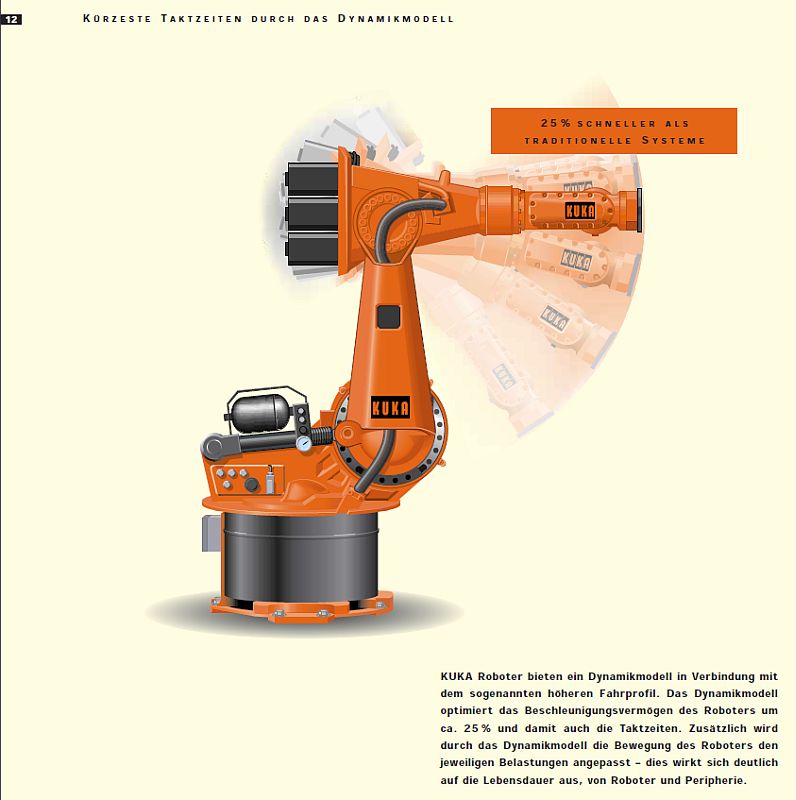
- KUKA Roboter mit kürzesten Taktzeiten durch das Dynamikmodell
-

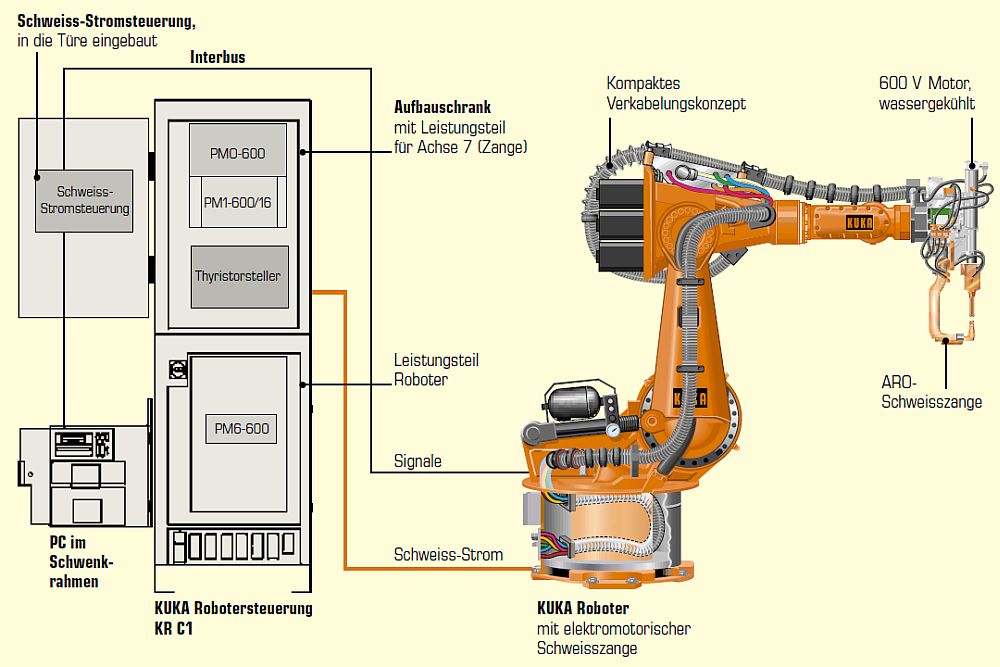
- KUKA Roboter mit elektromotorischer Schweisszange
-
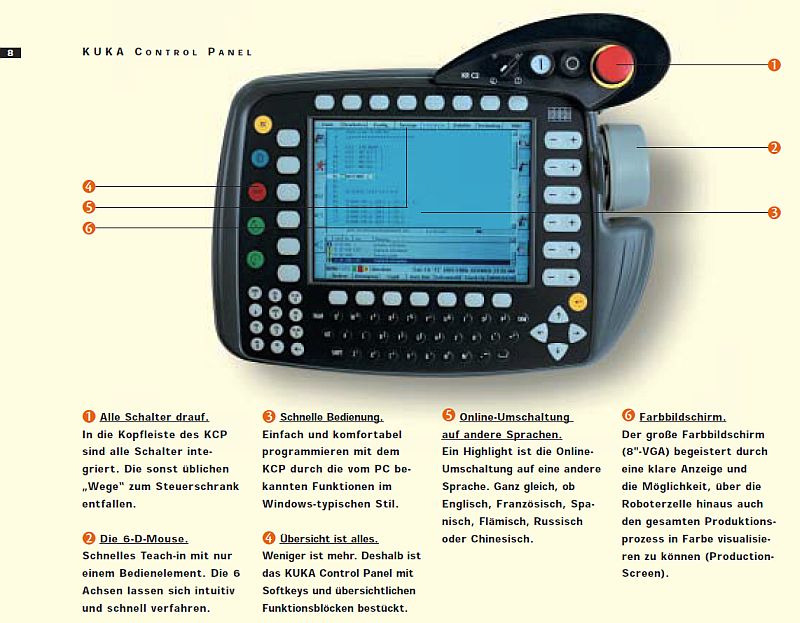
- Das KUKA Control Panel
Steuerungstechnologie

KUKA setzt konsequent auf die PC-Steuerung - ein Standard, der auf der ganzen Welt gleichermaßen bekannt ist und nicht zusätzlich erklärt werden muss. Gerade auch für global operierende Kunden ein entscheidender Vorteil.
Programming by demonstration
KUKA Industrieroboter
-

- KUKA KR 3

-

- Die neue KUKA Roboter Serie 2000

-

- Die neue KUKA Roboter Serie 2000

Fujitsu Siemens Computers – Photo Server
-

- Mainboards von Fujitsu Siemens Computers im Einsatz – 1

-

- Mainboards von Fujitsu Siemens Computers im Einsatz: KUKA-Steuerschrank

industrial robots synchronized cooperating with KUKA RoboTeam
KUKA Industrieroboter
-

- KUKA Steuerungstechnik %u2013 KR C3 und Control Panel KCP

-

- KUKA Control Panel mit HMI Studio

-

- KMC %u2013 KUKA Motion Control
-

- KMC %u2013 KUKA Motion Control

-

- KMC %u2013 KUKA Motion Control

-

- KUKA BendTech

-

- KUKA BendTech
-

- Sensorunterstützte Montageapplikation
-

- Occubot VI Kraft-/Momentengesteuertes Sitztestsystem

-

- KUKA Roboter mit OPC-Server

-

- Zwei KUKA Roboter KR 6 mit SKS-Schweißequipment

-

- Der KUKA Roboter Konsolroboter

-

- KUKA Sim
-

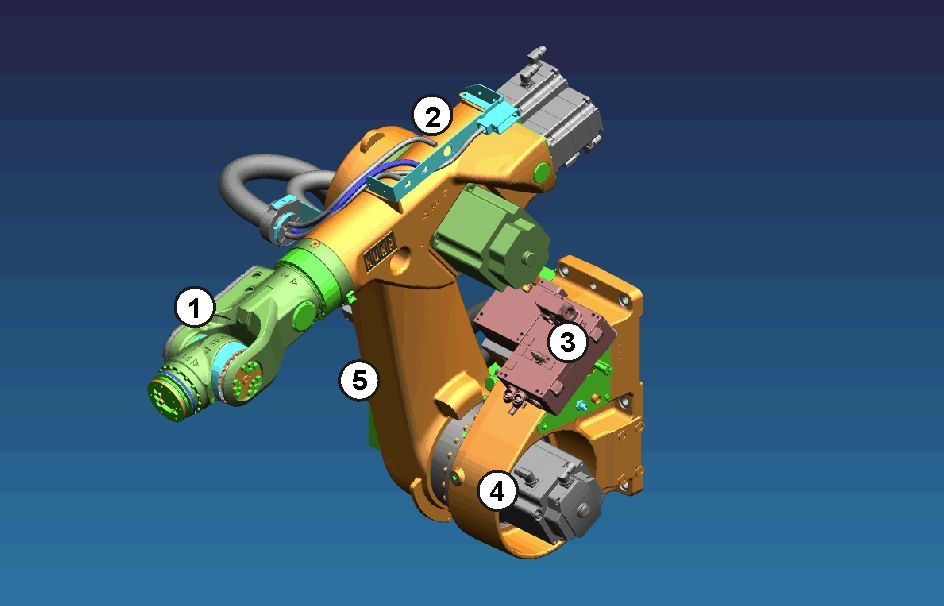
- KUKA Roboter KR 60 JET: Hauptbaugruppen
-
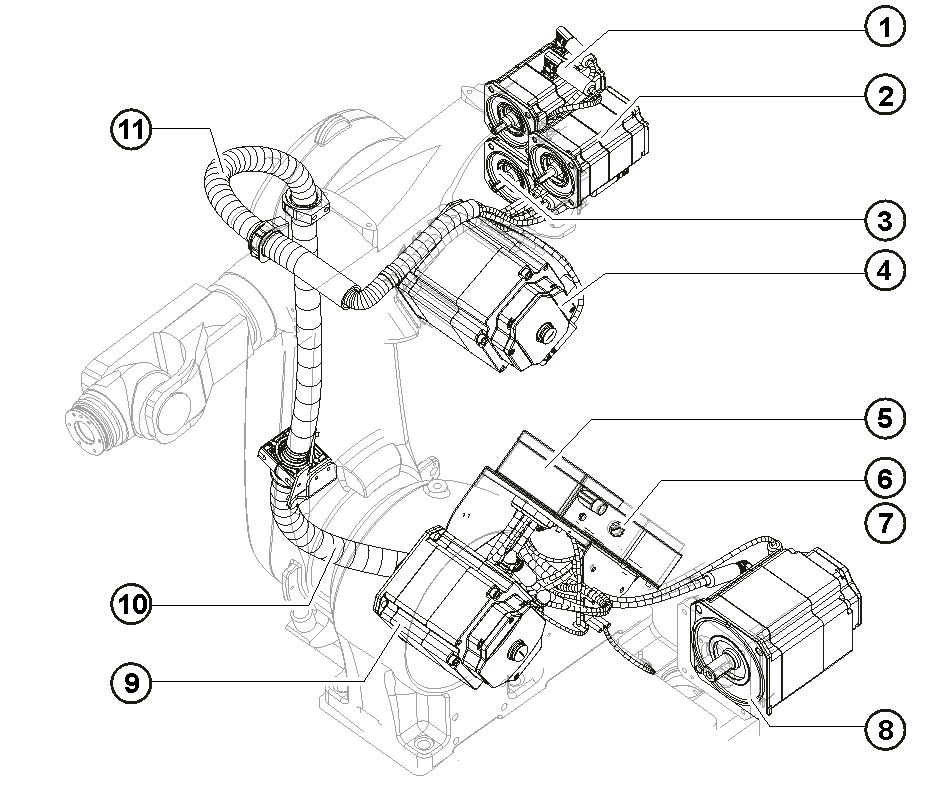
- KUKA Roboter KR 60 JET: Elektro-Installation
-

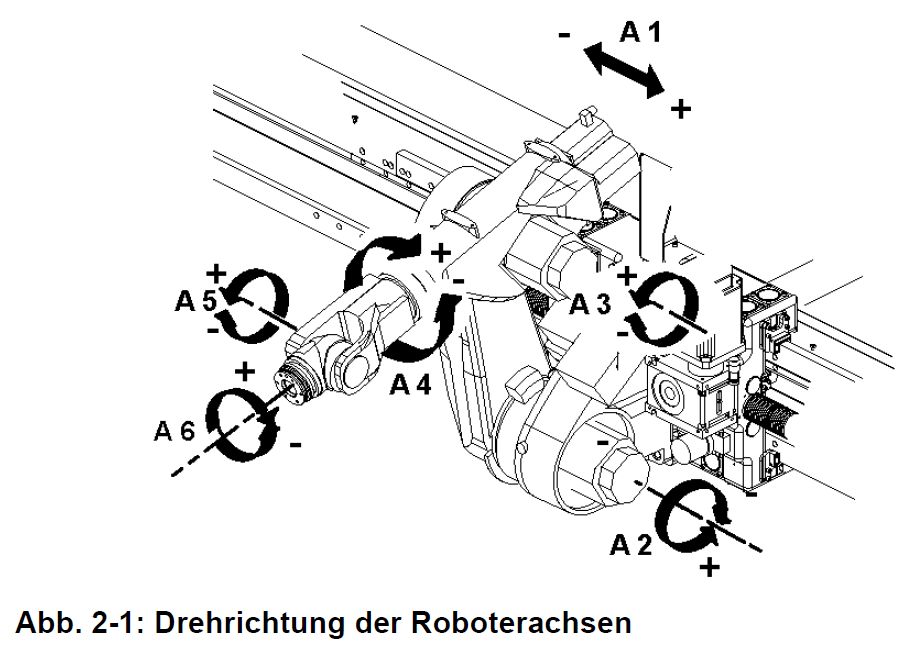
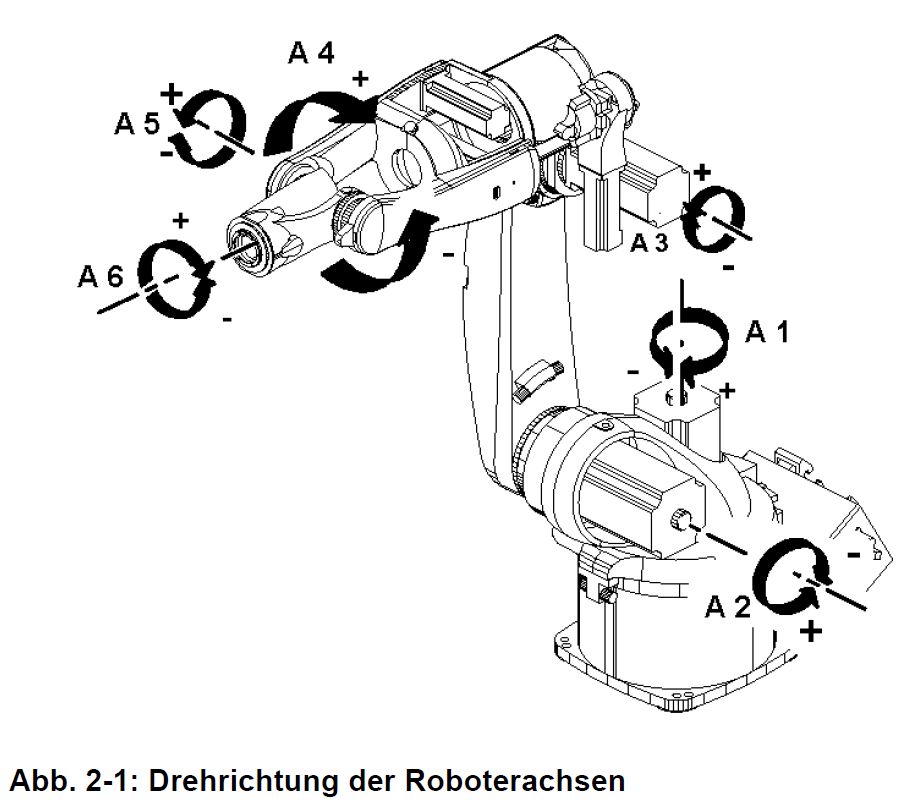
- KUKA Roboter KR 60 JET: Drehrichtung der Roboterachsen
-

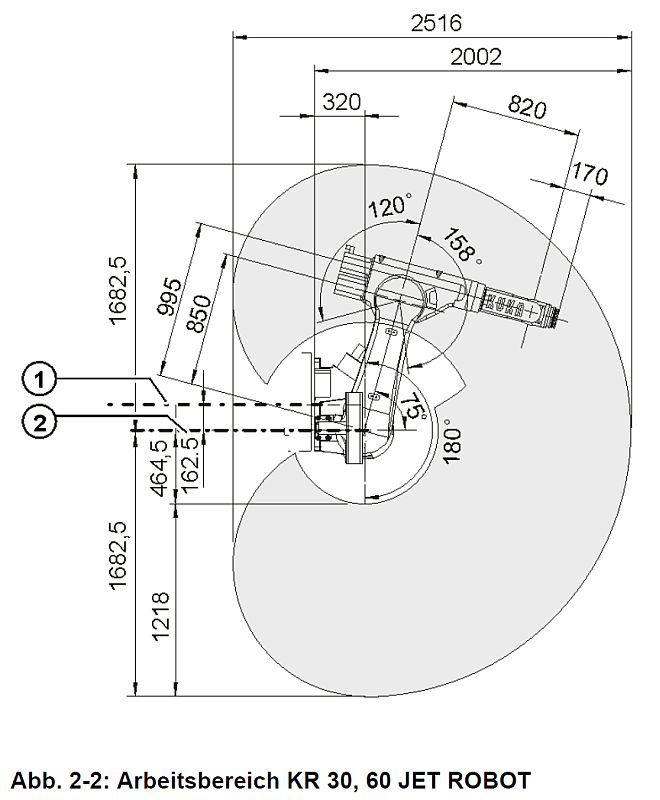
- KUKA Roboter KR 60 JET: Arbeitsbereich
-
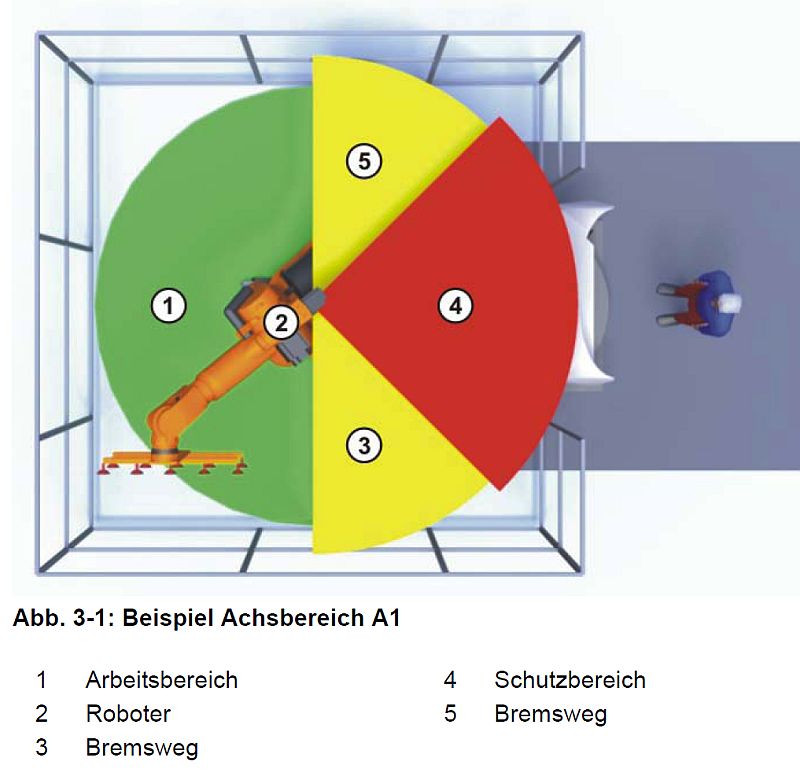
- KUKA Roboter KR 60 JET: Arbeits-, Schutz- und Gefahrenbereich
-
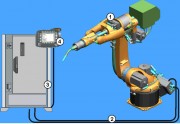
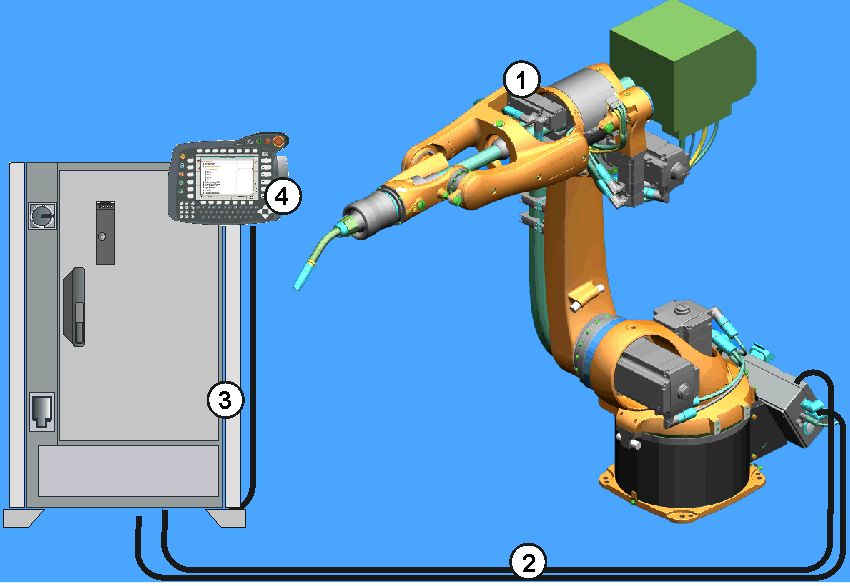
- KUKA Roboter KR 5 arc HW: Komponenten:
-

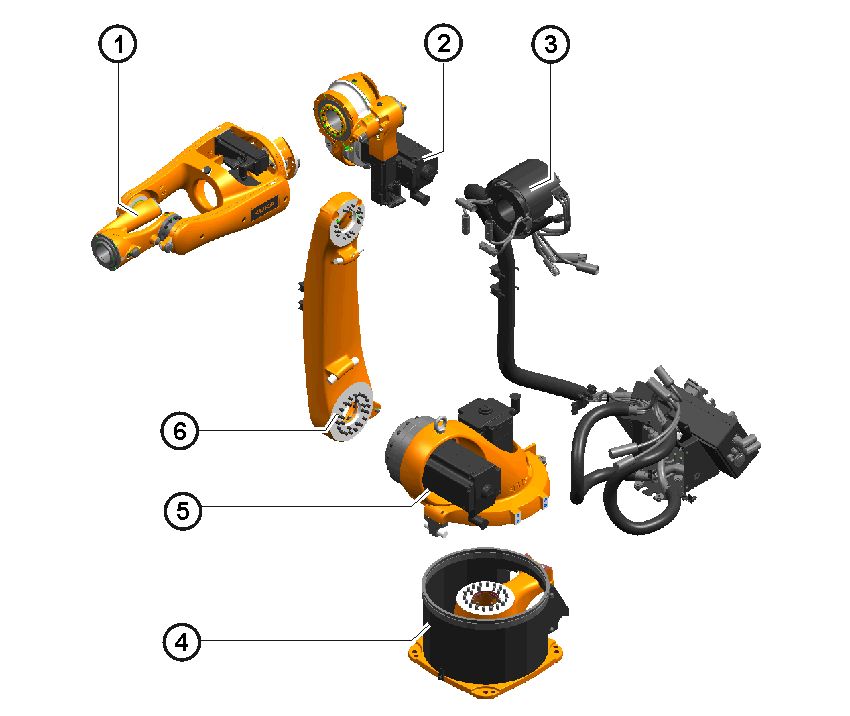
- KUKA Roboter KR 5 arc HW: Hauptbaugruppen
-
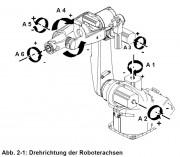
- KUKA Roboter KR 5 arc HW: Drehrichtung der Roboterachsen
-
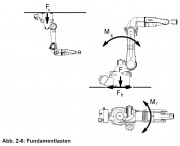
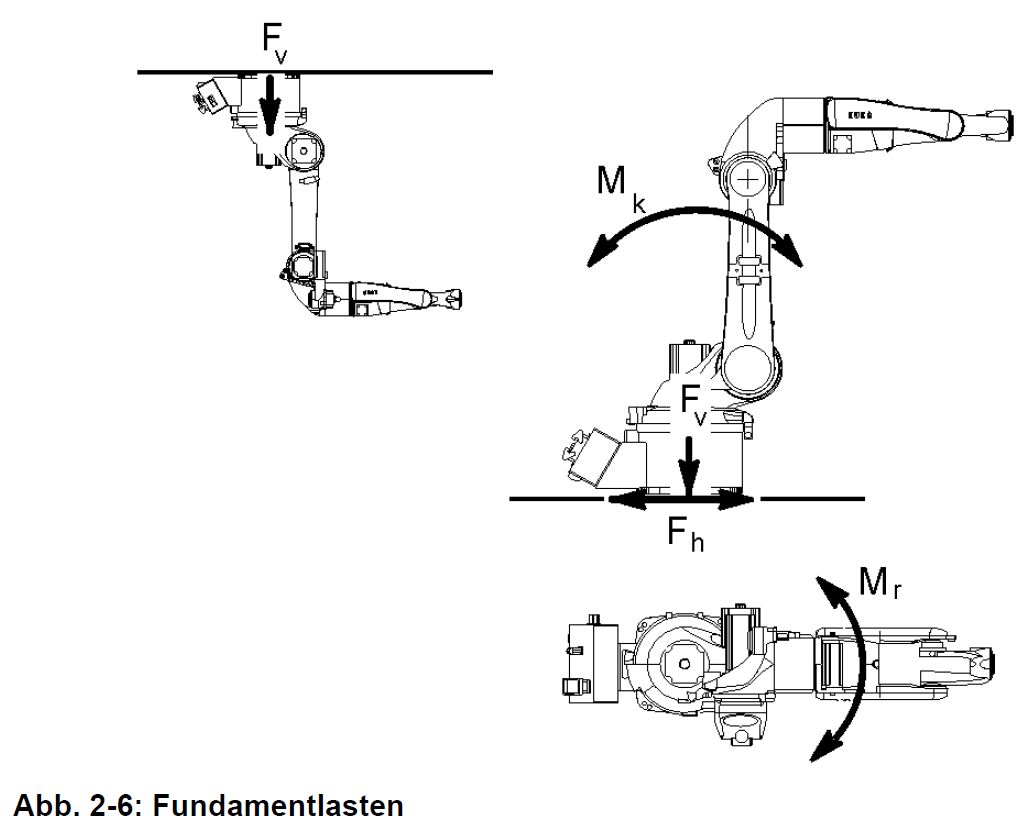
- KUKA Roboter KR 5 arc HW: Fundamentlasten